ホワイトペーパーをダウンロード
車載センシング用HDRイメージング
AltaView™ トーンマッピング搭載 Triton™ HDRカメラ

自動車業界、特に自律走行車や先進運転支援システム(ADAS)搭載車の領域では、画像処理と視覚認識に関して多くの課題に直面しています。車載ビジョンシステムの重要な一部として、カメラは、変動する温度、変化する天候、多様な地形など、幅広い困難な環境条件に遭遇します。また、カメラは無数のLEDライトを含む環境を移動します。これらの各環境において、カメラはシームレスに機能し、安全で正確な車両操作を保証するだけでなく、AIトレーニング用のデータリッチ画像を提供するために、高品質の画像を提供する必要があります。このような問題を解決するソリューションのひとつが、ソニーのIMX490 HDRセンサーとLUCIDの革新的なカメラ搭載のトーンマッピングエンジンAltaViewを搭載したIP67対応の最新マシンビジョンカメラTriton HDRです。
目次:
– オートモーティブ・センシングの概要
– 屋外と車載用途での課題
– デイ&ナイト|高コントラストシーン
– 解決策:Triton HDRカメラ
– ソニーIMX490サブピクセル技術
– 次のステップ トーンマッピングの適用
– トーンマッピングとは?
– AltaViewによる開発時間の短縮
送信」をクリックすると、ダウンロードリンクが表示されます。
(日本語と英語のPDFがダウンロードできます。)
プレビュー
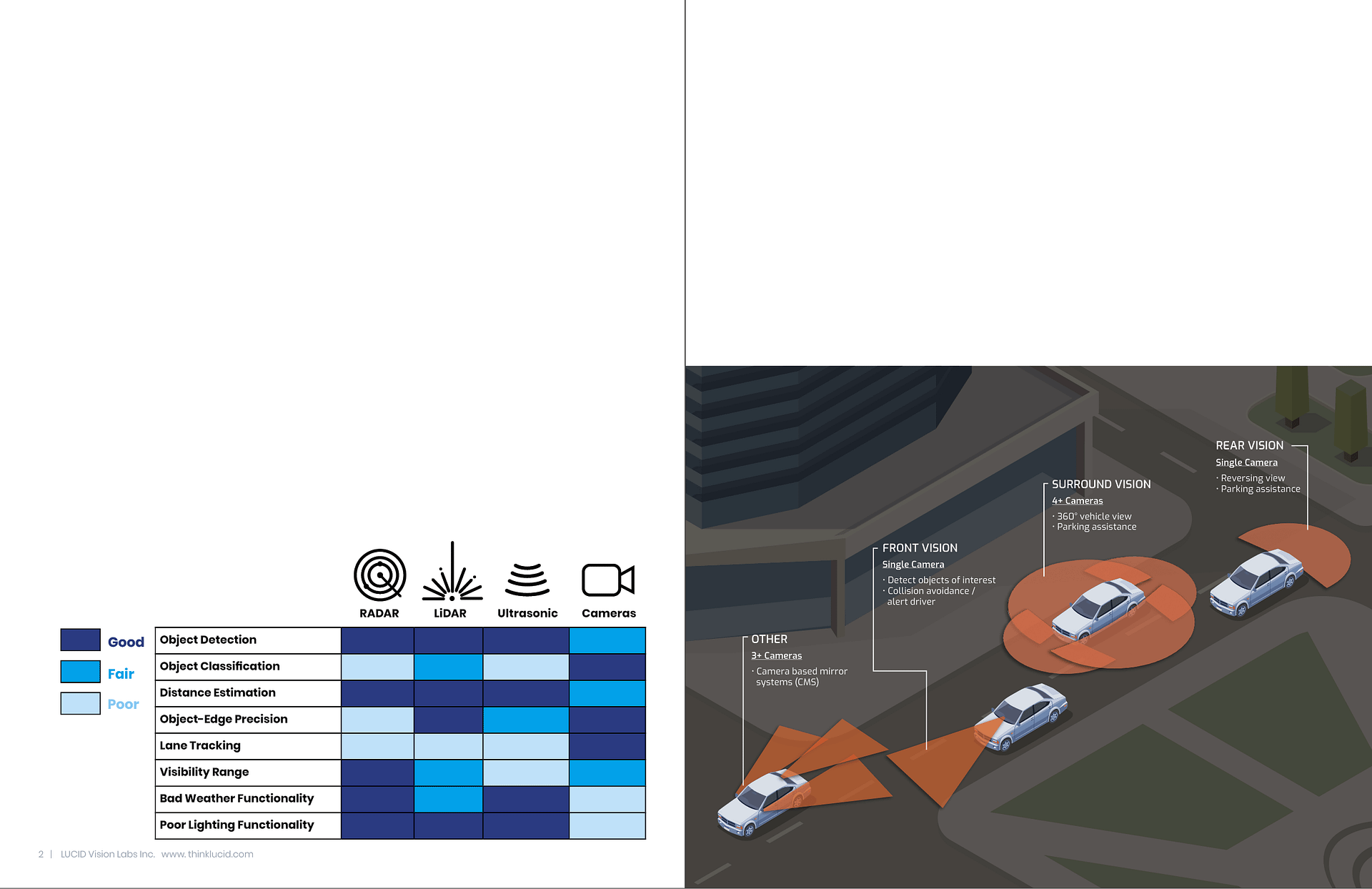
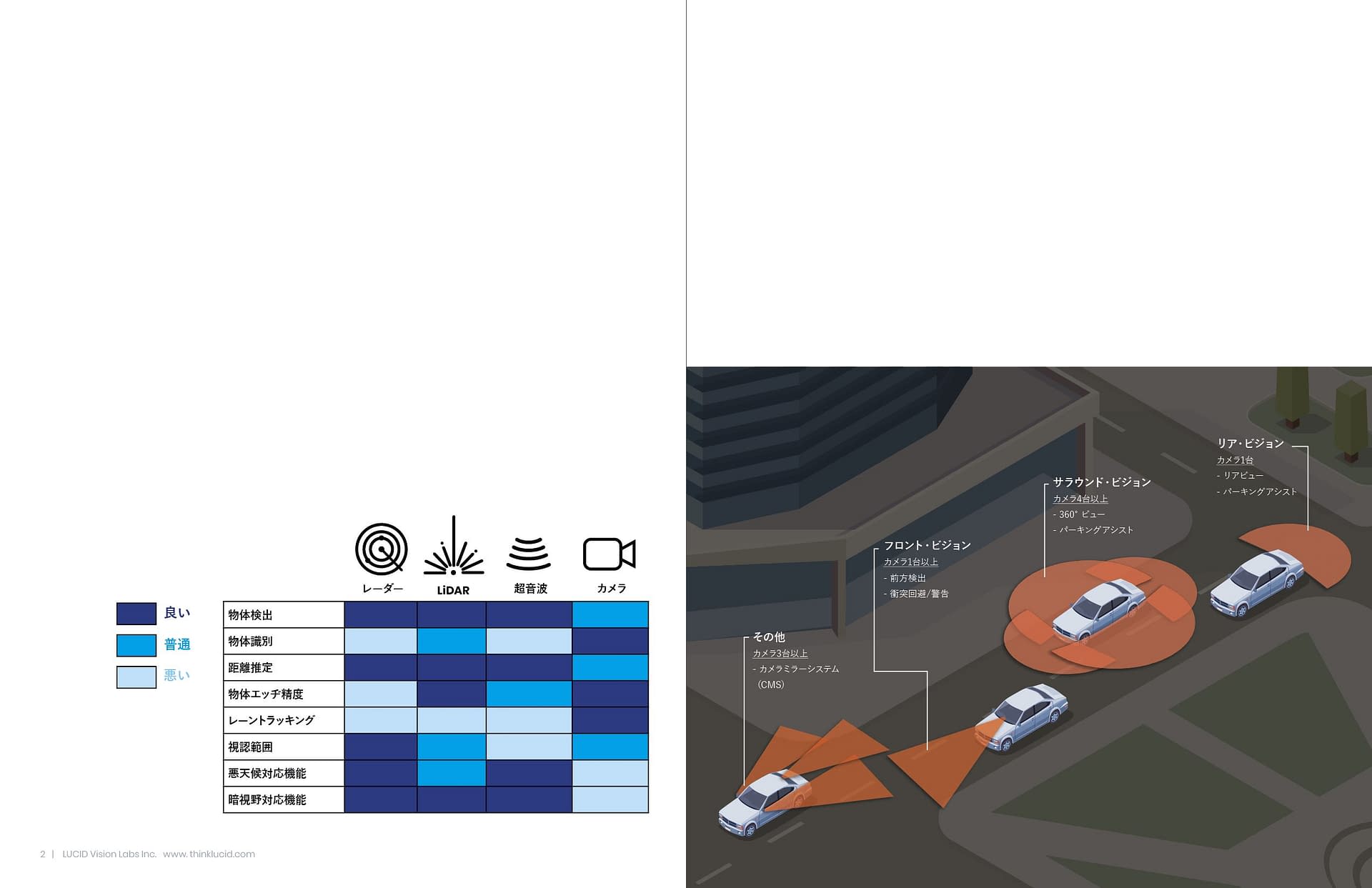
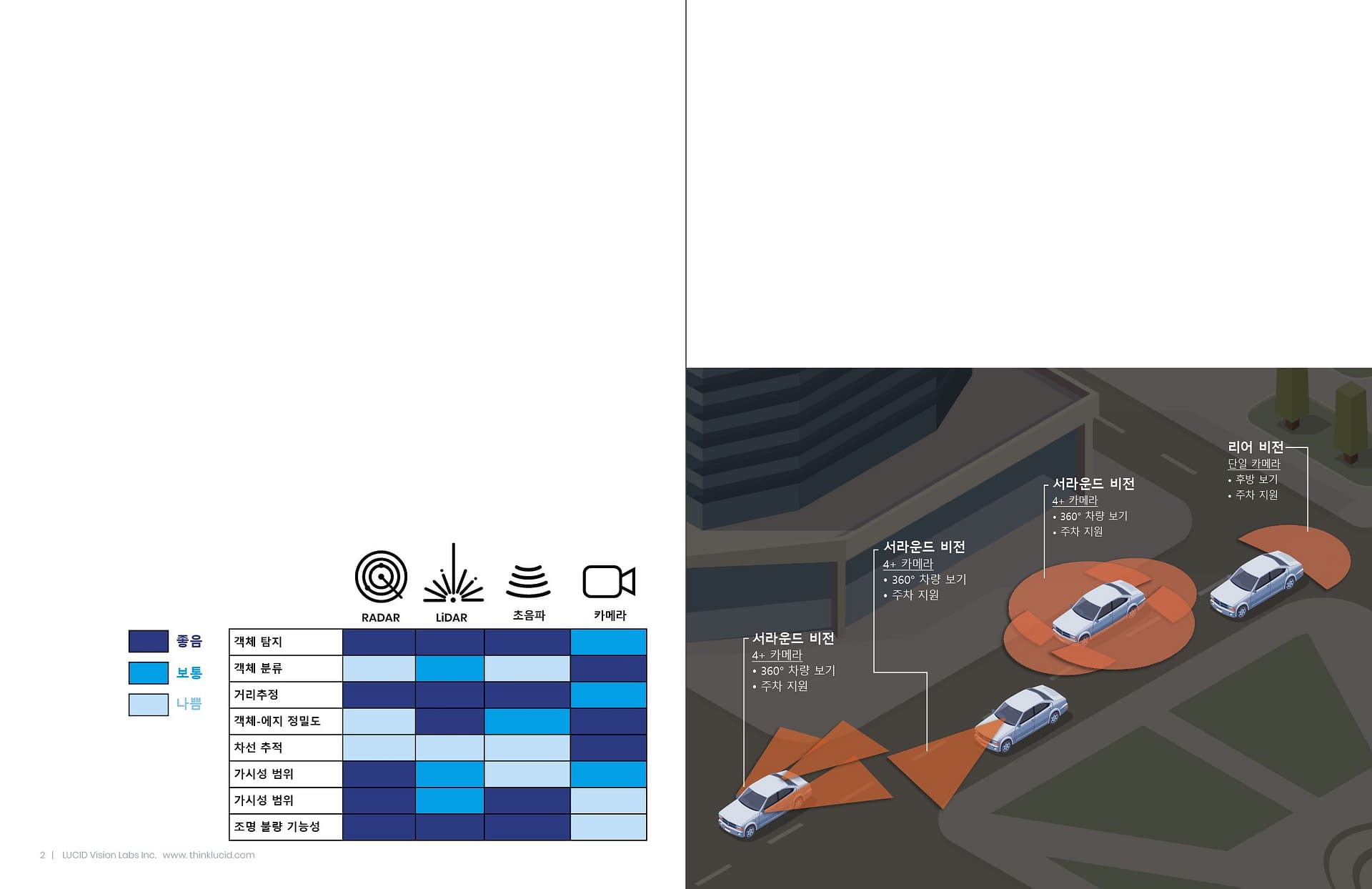
• LiDAR (Light Detection and Ranging) uses light in the form of a pulsed laser to measure variable distances. This technology offers high-resolution, 3D information about the surrounding environment, enabling the detection and localization of objects with great precision.
• Ultrasonic sensors, or sonar, send short bursts of sound waves to measure close-proximity objects, and is mainly used for parking assistance and blind-spot detection.
• Cameras, including conventional, infrared, and high dynamic range (HDR) versions, capture detailed visual information, making them essential for tasks like lane detection, traffic sign recognition, and pedestrian detection. Furthermore, camera data can be combined with RADAR /LiDAR information. While RADAR and LiDAR identify an object’s size and location, cameras offer additional contextualization by recognizing textures, such as road signs, for enhanced classification.
For autonomous vehicles and Advanced Drivers Assistance Systems (ADAS), cameras play a critical role in automotive vision systems. In particular, HDR cameras provide more data-rich imaging compared to conventional cameras. However, selecting an HDR camera built to tackle the specific outdoor and automotive challenges is a complex decision requiring deeper consideration. This white paper focuses on the challenges and solutions camera technologies can provide for automotive applications.
No single sensor technology can solve all the challanges for ADAS. Each technology has their own strengths, with all of them working together to form a “safety bubble” around the vehicle.