

アクティブセンサーアライメント
アクティブセンサーアライメント
目次
最良の場合:すべてのカメラで完璧なセンサーアライメントを実現
理想的な世界では、センサーの光学中心、傾き、回転、バックフォーカルディスタンス(BFD)は、すべてのカメラユニットで同一であるはずです。このようなシナリオでは、センサーの配置は一度仕様決定・検証され、その後のすべての製品に製造時に適用されます。しかし現実には、カメラを構成する各コンポーネントにわずかな差異が存在します。これには、レンズ鏡筒の角度、中心位置、奥行きと、PCB上のイメージセンサー位置との関係も含まれます。

上図:すべてのカメラ部品が正確に製造されている場合、センサーはすべてのユニットで同じ位置に配置することが可能です。

上図:カメラ製造時のセンサー配置に関わるいくつかの変動要素を示したアニメーションです。これらの要素が、カメラ内部でのセンサー配置のばらつきにつながる可能性があります。
センサー配置における課題
カメラ部品には、例えばイメージセンサー下のはんだ厚のばらつきや、パッケージ内でのセンサーダイそのものの傾きなど、ごくわずかな個体差が生じることがあります。こうした差は肉眼では判別できなくとも、画質には明確な影響として現れます。センサー面内でバックフォーカス距離にずれが生じ、結果として画面隅のピントが甘くなるなどの問題を引き起こします。下の画像は、センサーのアライメントが不十分な場合に、アプリケーション設計者が直面しうる典型的な問題を示しています。



左: センサーの傾き: センサー面内で焦点距離に差が生じ、一部のコーナーでピンボケが発生します。 中央: センサーの回転ずれ: センサーの回転角度が仕様からずれていると、カメラの取り付けが複雑化し、ユーザーは補正のための調整を強いられる可能性があります。右: レンズ鏡筒の偏心: レンズ鏡筒の中心がずれると、コーナー部分の光量低下(ケラレ)の原因となり、これを補正するためにカメラの取り付け方法の変更が必要になることもあります。
パッシブアライメント(従来方式)
従来、センサーを光路に合わせるには、カメラを構成する各部品の寸法公差を厳格に管理することに頼ってきました。カメラメーカーは複数のサプライヤーから部品を調達し、それら全てが規定の仕様を満たすことを確認する必要があります。そして、各部品が正しく組み合わさることを期待してカメラを組み立てます。これがパッシブアライメントと呼ばれる方法です。

この方式では、組み立て完了後に画質テストを行い、基準に満たないカメラを選別します。しかし、時には部品ロット全体の問題で、多くのカメラが仕様を満たさないこともあります。組み立て後のカメラを手直しするには高いコストがかかるため、メーカーによっては公差基準を緩め、製品をそのまま出荷せざるを得ないケースもあります。
アクティブセンサーアライメント:製造段階での高精度な位置決め
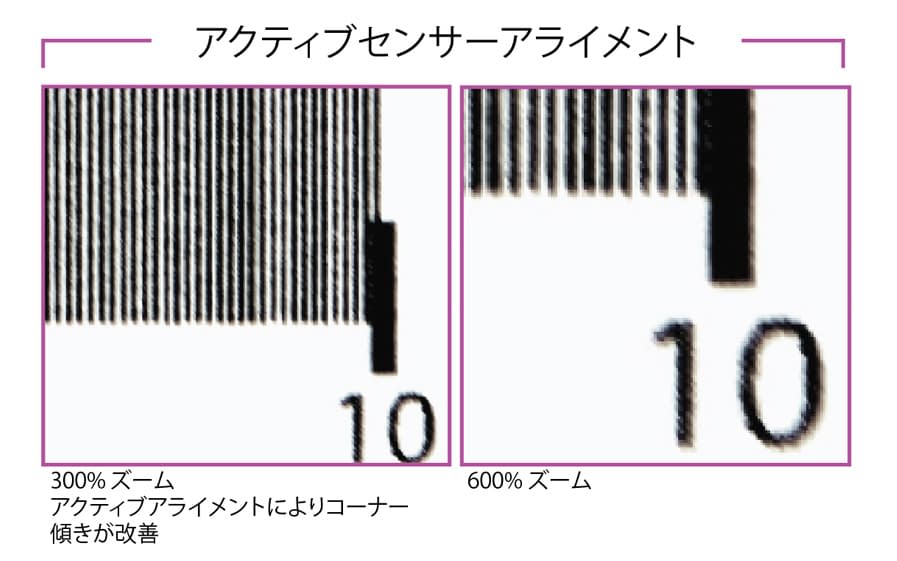
センサーを適切に配置するための、より高精度かつ効率的な手法がアクティブセンサーアライメントです。このプロセスでは、センサーの実装中に、専用システムが画像中心・回転・傾き・バックフォーカス距離をリアルタイムで測定。その測定結果に基づき、センサー位置を能動的に調整します。システムは、自動化された6自由度(6DoF)の精密な駆動ユニットと画像検査ユニットで構成されます。測定結果は、センサー面上に投影されたテストパターンを解析し、パターン全体のシャープネス(鮮明度)の均一性を測定します。例えば、コーナー部の焦点ずれを検出すれば、焦点が合うまでセンサーの傾きを微調整します。センサー面全体で最高のシャープネスが得られる位置を算出した後、全コンポーネントをその位置で固定します。


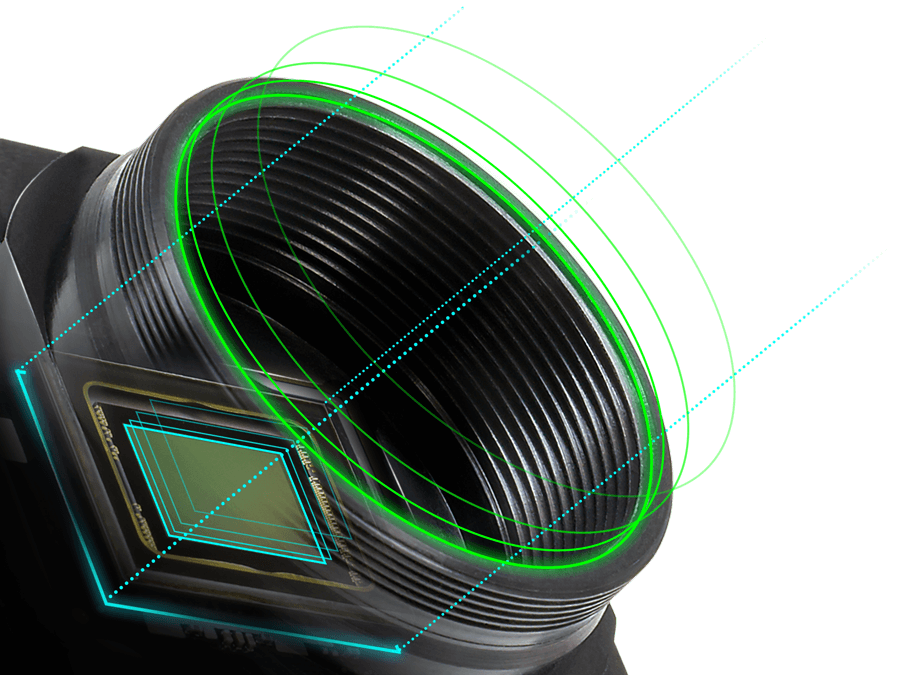
左: センサー上に光のテストパターンが投影されます。傾き、回転、奥行き(Z軸位置)のずれは、この光パターンを歪ませ、その歪みが測定されます。右: 検出された歪みは、6DoFシステムがセンサーを動かすことで補正されます。これにより、センサーはリアルタイムで最適な位置へと調整されます。
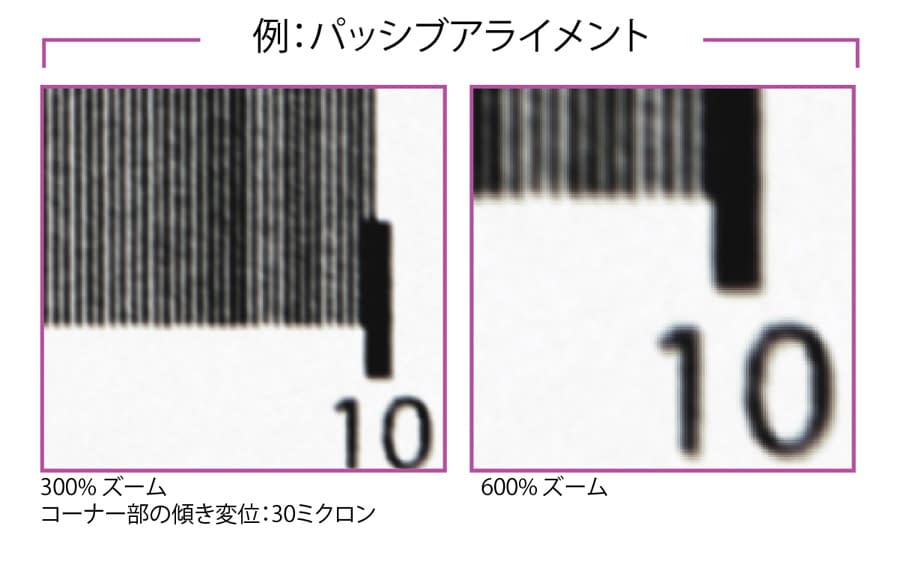
30マイクロメートルのコーナーずれのシミュレーション例
使用機材:1230万画素 Sony IMX304 CMOS 1.1インチセンサー、6mmレンズ F2.8。パッシブアライメントの例は、コーナー部で30マイクロメートルの変位がある状態をシミュレーションしたもの。


光路断面で見ると、アクティブアライメントによって、センサーは適切な焦点距離に、かつセンサー中心から各エッジまで等距離になるよう正確に配置されることが保証されます。
精密さと正確さ
アクティブアライメントを用いることで、マイクロメートル単位の分解能で直線位置や傾きを制御し、極めて正確なセンサー配置を実現します。特に小型センサーでは、精密なセンタリング(中心位置決め)が重要です。中心がわずかにずれるだけでも、カメラの取り付け精度に悪影響を及ぼすことがあります。一方、大型センサーでは、わずかな傾きが画像全体の焦点位置に大きな差を生じさせる可能性があります。高いカメラ精度が求められるビジョンアプリケーションにおいて、アクティブセンサーアライメントは、従来のパッシブアライメント方式よりも一貫して高いレベルの画像シャープネスを確保する上で、欠かすことのできない重要な製造工程となっています。

アクティブセンサーアライメント対応機種:
Atlas (5GigE)
Atlas IP67 (5GigE)
Atlas10 (10GigE)
Atlas25 (25GigE)
Triton (1GigE)
Triton2 (2.5GigE)
Triton10 (10GigE)
Helios2 ToF 3D Cameras (1GigE)