




実用的なインサイト
食品自動化におけるマシンビジョンシステムの主な要件は、困難な環境でも信頼できる情報を抽出することです。
これらのシステムから得られる画像データは、検査、分類、ガイド、動作を行う上位システムへと確実に渡される必要があります。土壌、処理、包装、保管の各段階におけるアプリケーションは一見大きく異なりますが、その根底にあるイメージング課題には、見た目以上に多くの共通点があります。課題を解決するには、画像品質だけでなく、初期評価では見落とされがちでありながら、後に安定したシステム統合と運用に不可欠となるカメラ機能も考慮する必要があります。
異なるアプリケーションに共通する課題
食品自動化は、幅広い環境と作業を対象とします。システムによっては、ほこりの多い圃場で石を検出したり、搬送中の魚を分類したり、ロボット洗浄のために不規則な有機表面を位置決めしたりする必要があります。また、グレアのある包装越しに製品を検査したり、反射の多い倉庫設備の周囲で自律型フォークリフトを誘導したりする場合もあります。一見すると無関係に見えるこれらのアプリケーションも、核となるビジョン要件に分解すると、同じ基本的なイメージング課題が繰り返し現れることが分かります。


生物学的および環境的なばらつき
自然物は均一ではありません。食品、有機表面、屋外環境、移動する対象物は、サイズ、形状、水分、位置、外観が大きく変化します。

リアルタイム判断
多くのシステムでは、検出だけでは十分ではありません。画像データは、プロセスのタイミング制約内でアクチュエーションをトリガできる速度で処理される必要があります。

光学的な曖昧さ
検査に必要な信号が弱い、隠れている、または可視光では現れない場合があります。グレア、透明材料、濡れた表面、表面下の欠陥は、標準的なRGBイメージングだけでは十分に捉えられないことがあります。

これら3つの課題は、特定のアプリケーションに一対一で対応するものではありません。1つのアプリケーションの中で複数の課題が同時に発生することもあります。そのため、同じカメラ技術がまったく異なるシステムで採用されることがあります。根本的なイメージング課題が似ている場合、堅牢な2Dカメラ、コンパクトな組み込みカメラ、3D Time-of-Flightカメラ、SWIRカメラ、または偏光カメラが想像以上に多様なユースケースで重要な役割を果たします。
センサーだけではない重要要素:
食品自動化で重要なカメラ機能
食品自動化向けのカメラ選定では、画像品質とセンサー性能は重要ですが、それだけでは十分ではありません。実際のシステムでは、環境保護性能、コンパクトなサイズ、同期、帯域幅、トリガ、サードパーティ製ソフトウェアまたはハードウェアとの互換性も重要になります。アプリケーションによっては、堅牢なM12スクリューロックケーブルコネクタや延長型イメージャーヘッドのように、見落とされがちな機能が、メガピクセル数やフレームレート以上に重要になる場合があります。
産業機器上で安定動作を実現する堅牢設計
- 衝撃および振動認証
- 確実な固定を可能にするマウント穴
- EN 60068-2-27, EN 60068-2-64, EN 60068-2-6
過酷な環境に対応する環境保護性能
- IP67の防塵・防水保護
- 広い動作温度範囲
- 密閉型コネクタ
- 産業用途向けEMC耐性
狭い機械スペースや組み込みシステムに適したコンパクトなフォームファクタ
- 24x24mmサイズ、約30g
- 90°および180°フォームファクタ
- 延長型ヘッドと各種ポートオプション
ロボット、コンベヤ、その他デバイスとの連携に必要なタイミングと同期
- カウンターおよびタイマー
- チャンクデータ、イベントデータ
- タイムスタンプ
決定論的な画像取得と装置制御のためのI/Oとトリガ
- GPIO
- 絶縁および非絶縁I/O
- PTP (IEEE 1588)
- ハードウェアおよびソフトウェアトリガ
安定したストリーミングのためのインターフェースと帯域幅
- Ethernetベースのカメラ
- 1GigE, 2.5GigE, 5GigE
- RDMA対応10GigE、25GigE
システム統合と互換性
- Arena SDK、API、コード例
- サードパーティ製ソフトウェア互換性
- GigE Vision、業界標準
このようにカメラ選定をより広い視点で捉えたうえで、次のセクションでは、こうした反復的なイメージングと統合の課題が食品自動化の各段階でどのように現れるかを見ていきます。まずは、屋外でのばらつき、動き、過酷な動作条件によって信頼性の高い検出が特に難しくなる土壌段階から始めます。
農場からフォークリフトまで: 土壌、処理、包装、保管
土壌:
制御が難しい過酷な環境で対象を検出
土壌段階のマシンビジョンシステムは、ワークフロー全体の中でも特に制御が難しい条件下で動作します。ほこり、振動、変化する照明、移動する機械、異物、不規則な地形はすべて、利用可能な画像データの取得を難しくします。課題は単に対象物を「見る」ことではなく、環境そのものが常に変化する中で対象物を確実に検出することです。
屋外の農業システムやフィールドベースのシステムが、安定した照明や固定された対象物提示条件で動作することはほとんどありません。対象物は部分的に隠れていたり、形状が不規則だったり、視覚的に紛らわしい要素に囲まれていたりします。同時に、カメラを搭載した装置自体も移動していることが多いため、イメージング、処理、動作が連携して行われる必要があります。
重要なポイント: 過酷な屋外環境では、画像品質と同じくらい、カメラの堅牢性、動作中の安定性、リアルタイム応答性が重要です。
主な課題
生物学的および環境的なばらつき
リアルタイム判断
石拾い
石拾いシステムは、ほこり、振動、制御されていない照明条件下で動作しながら、移動中の異物を検出する必要があります。これは、実験室のような理想的な条件よりも、動きの中での鮮明さと安定したトリガが重要になる実環境において、堅牢な2Dイメージングが難しい課題を解決できることを示す好例です。


システムで使用されたカメラ: Triton IP67カメラ。
グローバルシャッターを搭載した堅牢な産業用2Dカメラは、高速に移動するシーンを鮮明に撮像できます。また、IP67保護等級と衝撃・振動認証を取得したハードウェアにより、荒れた地形での屋外導入を支援します。
作物の精密散布
精密作物散布システムでは、非常に限られた機械スペース内で作物と雑草を識別し、局所的な散布判断をリアルタイムでトリガする必要があります。ここで最も大きな課題は画像解析だけでなく、ビジョンシステムを既存の農業機械に組み込むことです。


システムで使用されたカメラ: Phoenixモジュラーカメラ。
非常に小型で軽量なカメラプラットフォームは、センサーサイズそのものよりも重要になることがよくあります。フォームファクタ、取り付け方向の選択肢、柔軟な統合性は、システムを実際に導入できるかどうかを左右する重要な要素です。
処理:
生物学的な複雑さを実用的なデータに変換
食品処理の自動化では、複数のデバイスが同期し、決定論的に動作する必要があります。この段階では環境が変わりますが、土壌段階で見られた多くの課題が別の形で現れます。水分、汚れ、蒸気、洗浄環境、その他の環境的なばらつきがその代表例です。アプリケーションは、表面が一定でない有機対象を処理しながら厳しい許容差を満たす必要があり、同時に2Dまたは3Dで分類、位置特定、測定、検査、または動作ガイドを正確に行う必要があります。ここで食品自動化は特に複雑になります。
また、この段階では、さまざまなセンシングモダリティの価値がより明確になります。コンパクトな2D分類に依存する作業もあれば、3D点群や可視光を超えたイメージングを必要とする作業もあります。
重要なポイント: 食品処理における信頼性の高い自動化は、作業内容に適したセンシングモダリティを選択できるかに左右されます。それが2D分類であっても、3Dガイドであっても、可視光を超えたイメージングであっても同じです。
主な課題
生物学的および環境的なばらつき
リアルタイム判断
光学的な曖昧さ
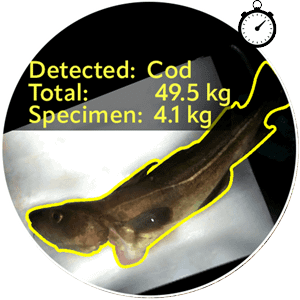
漁獲登録
魚が連続的に収集・処理される環境では、ビジョンシステムは変動する動きや照明条件の中で魚種を分類し、サイズまたはバイオマスを推定し、対象を追跡する必要があります。これは、生物学的なばらつきとリアルタイム判断が1つのシステムで結び付く代表的な例です。

システムで使用されたカメラ: Phoenixモジュラーカメラ。
コンパクトなカメラは、スペースが限られ、処理条件を予測しにくいシステム筐体内の収集ポイントに直接組み込むことができます。
乳牛の洗浄
多くの食品自動化アプリケーションでは、ロボットが生きている動物や剛体ではない生物学的表面と相互作用する必要があります。このような状況では、3D形状情報が非常に重要です。課題は単に対象を見ることではなく、濡れていて反射があり、動きのある条件下でも安定した点群データを抽出することです。


システムで使用されたカメラ: Helios2+ 3D ToF IP67カメラ。
LUCIDの3D Time-of-Flightカメラは、ロボットガイダンスに必要な奥行きデータを提供でき、HDRと産業用保護等級(IP67)により、厳しい動作条件でも信頼性を維持しやすくなります。
食品安全
食品安全検査では、濡れて反射のある条件下で、不規則な表面に汚染が現れることがあり、検査時間も限られる場合が多くあります。課題は汚染を検出するだけでなく、後工程の除去や処理に使用できる精度で位置をマッピングすることです。


推奨カメラ: Helios2 Chroma RGB-D IP67カメラ。
RGB-Dカメラシステムは、カラー情報と奥行き情報を組み合わせることで、外観ベースの検出を空間的な動作につなげやすくし、2Dシステムと3Dシステムを個別に一から構築する場合と比べて統合の複雑さを軽減します。
材料特性の把握
処理工程の課題の中には、形状とはまったく関係のないものもあります。打撲、含水率の違い、微細な材料差は実際に存在していても、標準的な可視光イメージングでは識別が難しい、または不可能な場合があります。可視光だけでは十分でない場合、エンジニアは必要なコントラストを得るために、他の波長や光の特性を活用する必要があります。


推奨カメラ: Atlas SWIRおよびTriton SWIR IP67カメラ。
SWIRイメージングは、利用できる波長範囲を可視光の外へ拡張し、標準RGBカメラでは捉えにくい水分量、打撲、材料特性に関する情報をシステムが取得できるようにします。
包装:
反射性包装材とさまざまな向きに対応する信頼性の高い検査
製品が包装段階に入ると、多くの課題は変化します。対象物の形状や位置はより制御しやすくなりますが、包装材そのものが新たな光学的問題を生み出すことがよくあります。プラスチックフィルム、シュリンク包装、光沢ラベル、密封トレイ、透明表面は、グレアを発生させたり重要な細部を隠したりして、検査に影響を与える可能性があります。同時に、システムは製品の向きが変化する中でも、連続稼働しながら速度と再現性を維持する必要があります。
重要なポイント: 包装自動化では、欠陥を検出したり対象物の向きを判断したりするために十分なコントラストを確保することは、課題の一部にすぎません。カメラのタイミング、同期、上位装置との統合も同じくらい重要です。
主な課題
リアルタイム判断
光学的な曖昧さ
包装フィルム検査
包装フィルム検査では、必要な信号がすでに存在していても、プラスチックフィルムや光沢表面のグレアによって取り出しにくくなることがあります。鏡面反射が検査に必要な細部を隠すため、標準的なイメージング方式では限界が生じる場合があります。


システムで使用されたカメラ: Triton PolarizationおよびPhoenix Polarizationカメラ。
偏光イメージングは鏡面反射と拡散反射を分離できるため、反射性包装の条件下でも表面の細部を復元しやすくし、包装材そのものの欠陥を識別しやすくします。
ブリスター包装
ブリスター包装およびピックアンドプレースシステムでは、包装されたアイテムを識別し、位置と向きを判断し、その座標をロボットまたは後工程へ送ることがよく求められます。製品が比較的規則的であっても、システムは反射性材料や複雑な配置に対応し、24時間連続運転にも対応する必要があります。

システムで使用されたカメラ: Triton IP67カメラ。
同期機能を備えた産業用2Dカメラは、再現性の高い検出、タイミング制御、ロボット連携をサポートできます。このようなアプリケーションでは、ハードウェアトリガ、PTP、タイムスタンプ、アクションコマンド、サードパーティ製ソフトウェア互換性といった機能が、センサーそのものと同じくらい重要になる場合があります。
保管および物流:
安全なマテリアルハンドリングのためのリアルタイム認識
保管および物流段階では、課題は製品の検査から、動いている環境を理解することへと移ります。自律型フォークリフト、パレットハンドリングシステム、その他の物流プラットフォームは、周囲の空間を継続的に認識し、物体や構造物を検出し、安全な走行または位置決め判断をリアルタイムで行う必要があります。
ここでマシンビジョンは、より自律的なシステムの一部となります。保管および物流段階では、これまでのワークフローで見られた多くの課題が組み合わさって現れます。環境的なばらつき、反射面での限られたコントラスト、リアルタイム動作の必要性がその代表例です。ただし、ここでの画像データは単一の検査イベントではなく、連続的な認識システムへの入力となります。
重要なポイント: 自律物流における目標は、単に3Dデータを取得することではなく、安全な走行と位置決めのために信頼できる空間情報を継続的に提供することです。
主な課題
生物学的および環境的なばらつき
リアルタイム判断
光学的な曖昧さ
自律型フォークリフト
自律型フォークリフトシステムは、動的な倉庫環境を走行し、ラック位置を検出し、距離を推定し、反射の多い産業表面や移動する障害物の周囲で安全に動作する必要があります。ワークフローが構造化されていても、環境が静的であることはほとんどありません。


システムで使用されたカメラ: Helios2+ 3D ToF IP67カメラ。
LUCIDの3D Time-of-Flightカメラは、ロボットガイダンスに必要な奥行きデータを提供でき、HDRと産業用保護等級(IP67)により、厳しい動作条件でも信頼性を維持しやすくなります。
異なるアプリケーション。共通するイメージング課題。
土壌、処理、包装、保管を通じて、食品自動化システムは一見大きく異なるように見えますが、同じ中核的なイメージング課題が繰り返し現れます。生物学的および環境的なばらつき、リアルタイム判断、光学的な曖昧さは、ワークフロー全体でさまざまな組み合わせで現れます。そのため、同じカメラ技術が非常に異なるアプリケーションを支援できるのです。成功するアプリケーションは、センシングモダリティだけで決まるわけではありません。堅牢設計、同期、トリガ、帯域幅、ソフトウェアサポート、システム統合も、信頼性の高い導入において同じくらい重要な役割を果たすことが多くあります。
目標は単に画像を取得することではなく、上位システムが実際の動作へ変換できる信頼性の高いデータを提供することです。
センシングモダリティマップ

生物学的および環境的なばらつき
屋外環境、水分、動き、不規則な形状、変化し続ける対象物のサイズ、形状、位置。
堅牢な2D / 3D、コンパクトな組み込み
物理的なばらつきが大きく制御が難しいシーンでは、堅牢な筐体、コンパクトなフォームファクタ、または奥行きセンシングを活用します。
リアルタイム判断
検出結果は、ロボット、コンベヤ、噴霧装置、または自律システムの即時動作につながる必要があります。
同期、トリガ、帯域幅、2D/3D
画像データが直ちに動作を駆動する必要がある場合、カメラのタイミング、トリガ制御、安定したストリーミングが重要になります。
光学的な曖昧さ
必要なコントラストが、グレア、透明性、濡れた表面、または可視光の限界によって現れない場合があります。
SWIR、偏光、RGB-D
信号が弱い、隠れている、反射が強い、または整合されたカラーと奥行き情報が必要な場合は、標準RGBを超えたアプローチが必要です。