Using Matrox Image Library (MIL) for Linux
Matrox Imaging Library (MIL) is a comprehensive collection of software tools for developing machine vision, image analysis, and medical imaging applications. The toolkit features interactive software and programming functions for image capture, processing, analysis, annotation, display, and archiving. The following instructions describe how to configure Lucid Vision GigE cameras with Matrox Imaging Library for Linux.
System Specifications
- Ubuntu 16.04.1 64-bit, kernel 4.4.0-31
- MIL 10.20 R3 (build 517) 64-bit
Table of Contents
Prerequisites
-
Install the setserial dependency.
$ sudo apt-get install setserial -
Install GigE Vision support at the time of MIL software installation.
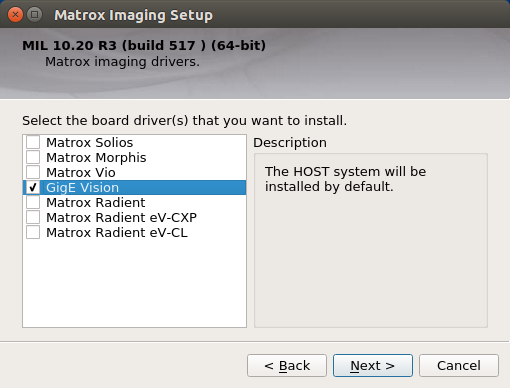
-
Verify GigE Vision support is installed by opening MilConfig and finding GigE Vision as an installed Board in General -> Information. MilConfig can be launched by typing milconfig in the terminal.
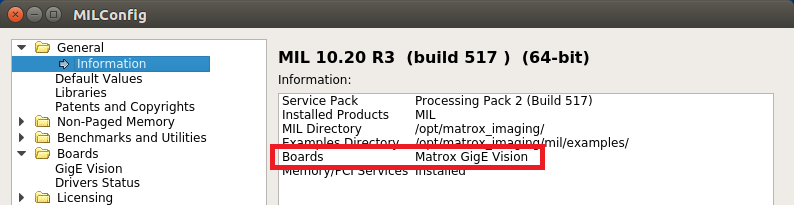
By default, MIL is installed to /opt/matrox_imaging/.
Note
Kernel versions 4.8 and 4.10 are currently unsupported.
Matrox Example Launcher
Matrox Example Launcher is an interface to evaluate MIL’s image acquisition samples. Matrox Example Launcher can be launched by typing milexamplelauncher in the terminal.
The following shows the MdigGrab sample.
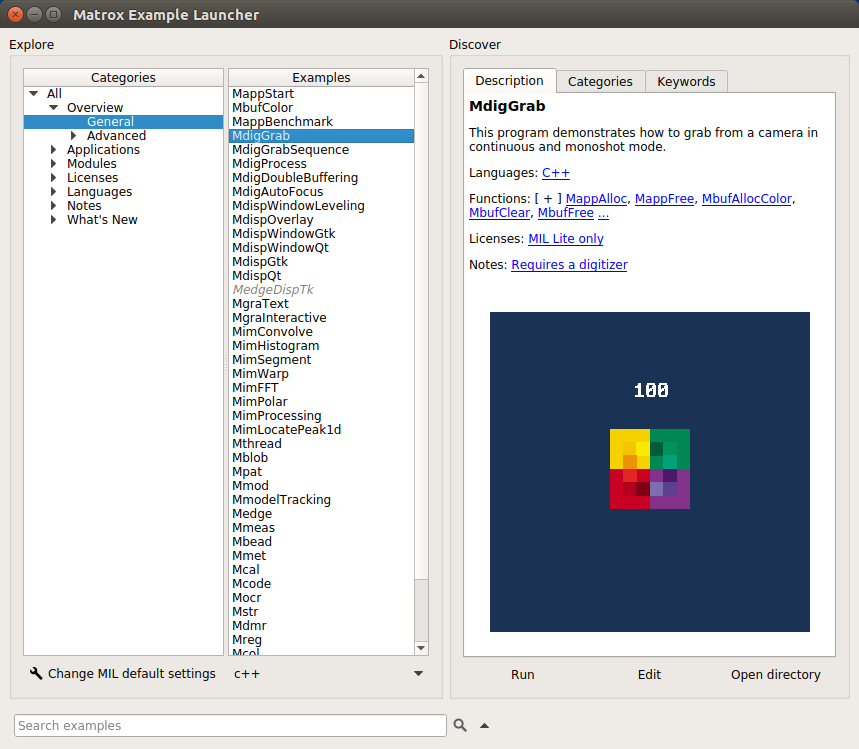
By default, the MIL samples are installed to $MILDIR/examples.
For more information on Matrox Imaging Library please visit https://www.matrox.com/imaging/en/products/software/mil/